|
The trail
|
Motorcycle geometry
The trail and the directional stability of the vehicle
Trail changing during a curve
The motorcycle geometry
Commonly when we speak about the motorcycle geometry we refer to the following three geometric parameters:
- the wheelbase;
- the castor angle;
- the trail.
Consider the vehicle in vertical position and with the steer rotation angle equal to zero. (fig.1).
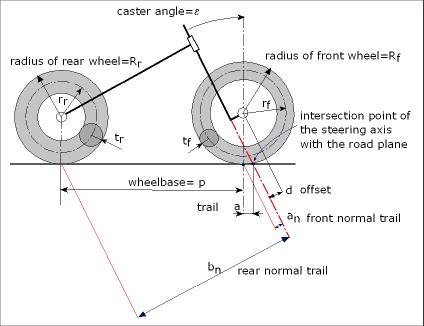
Fig. 1 The motorcycle geometry
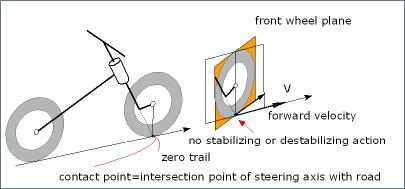
The wheelbase is the distance between the contact points of the tires with the road plane; the castor angle is the angle between the vertical axis and the rotation axis of the front frame (steering head); the trail is the distance between the contact point of the front wheel with the road plane and the point of intersection of the steer axis always with the road plane.
The geometric parameters shown in the figure above represent:
- p= the wheelbase;
- d = the offset;
- e = the castor angle;
- Rr= rear wheel radius;
- Rf= front wheel radius;
- tr= rear tire radius; tf= front tire radius>;
 = rear radius of the tire section;
= rear radius of the tire section;
 = front radius of the tire section;
= front radius of the tire section;
The trail and the castor angle are very important because they define the geometric characteristics of the steer. They are also determinant to define the handling and the stability of the vehicle.
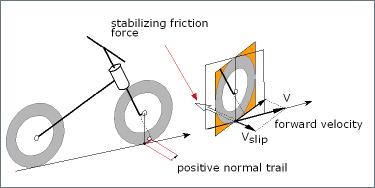
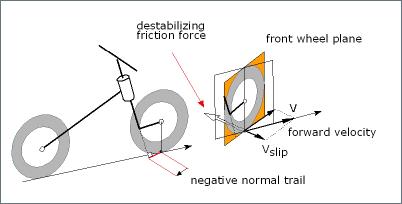
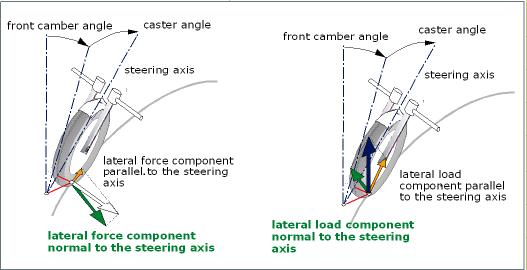
During the motion the road-holding is due to the friction lateral forces that are perpendicular to the intersection of the plane of the wheels with the road surface. The lateral forces lie on the road plane and generate a momentum around the steer axis that is proportional to the distances an and bn; these distances are linked to the trail and wheelbase through the following equations:



an represent the normal trail that is the distance between the contact point of the front wheel and the steer axis. This simply consideration is sufficient to understand that the wheelbase and the trail are linked among them and so they must be considered together. It is wrong speak about big or little trail if it isn't referred to the wheelbase of the vehicle.
It is important to observe that the distance bn can be thought as the normal trail of the rear wheel.
Equal values of the trail can be obtained with different construction solutions.
In the most simply solution the fork axis is super-imposed to the steer axis. It is possible also use the steering axis and the fork axis that have a different inclination between them. This solution haven't got appreciable advantages.
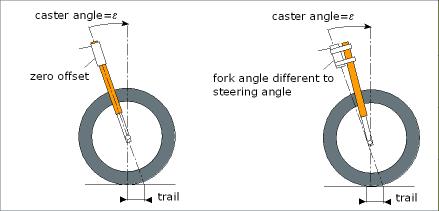
Fig. 2 Trail obtained with the inclination of the front fork. Front fork with equal (on the left) and different slope from the steer axis (on the right).
In most cases the trail is obtained inclining the steer axis (21-35°) and advancing the front fork and/or the front wheel respect to the steer head.
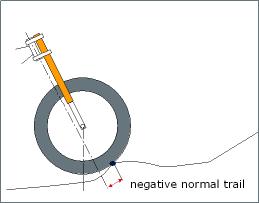
Theoretical it is possible realize the trail with a zero degree steer slope; this solution has got some disadvantage; in fact the front fork suffer a bigger stress and compression during the braking.
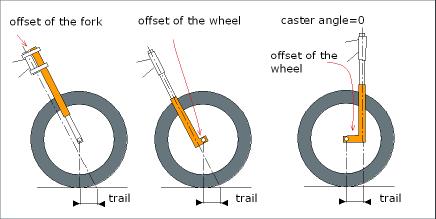
Fig. 3 Trail obtained withoff set of front fork and/or the wheel.
Now some consideration on the geometric values normally used are explain.
The next schedule shows the geometric values of some motorcycle.
(the values are been deduced by unofficial publications and so they me be incorrect)
|
|
[mm] |
[gradi] |
[mm] |
[mm] |
front/rear |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A parameter to make a comparison between the different motorcycle geometry can be the ratio between the front and rear normal trail:
![]()
The front normal trail is variable in the field of 4-8% respect to the rear normal trail.
The racing motorcycles have got the value of the ratio that is about 6%; the sporting and super sport vehicles have got the ratio that is from 6 to 6.5%; the touring vehicles have got the ratio that is from 6 up to 8%.
The motorcycles like cruiser (heavy vehicles ) are characterized by a ratio of 5-6%, then they have got little trail respect to the wheelbase. It is due, probably, to the need to have a good handling when the speed is low; since the load on the front wheel is high due to the heavy total mass of the motorcycle, the choice of a little trail reduce the steering torque applied by the rider to drive the bike. It is to observe that the normal use of these vehicles is at not high velocity and so it is not necessary a big trail that guarantee high stability at high speed.
For the same reason the ratio is little also for the scooter.
At rigour the ratio may consider the mass distribution on the wheels; a vehicle with a big load on the front wheel needs a lower trail. In fact big loads on the front wheel generate bigger lateral friction forces under the same slip of the wheel. Therefore, to obtain the same recall torque around the steer axis it is necessary reduce the normal trail.
The correct ratio in function of mass distribution on the wheel is:
![]()
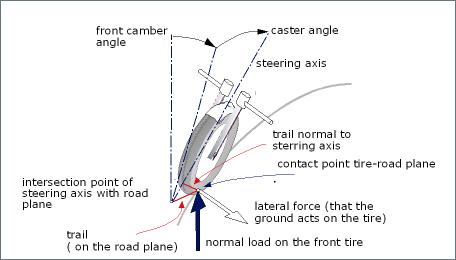
Fig. 4 Vertical load and lateral force acting on the front wheel.