|
Vittore Cossalter |
|
|
Vittore Cossalter |
|
Forces on the front suspension during braking
The motorcycle front suspension during braking is acted on by two forces:
load transfer;
braking force.
The load transfer is proportional to the total (front plus rear) braking force and to the mass centre height of the motorcycle and inversely proportional to the wheelbase.
![]()

Fig. 1 Load transfer and braking force.
Figure 2 shows the action of the load transfer and front braking force of the front suspension. The red line represents the path of the contact point (which is seen from a reference frame connected to the motorcycle) during the front suspension movement. The compression of the suspension depends on the angle between the direction of the resultant force and the direction of the suspension movement; there is maximum compression when they are parallel. The green vectors in the figure are the components of the load transfer and front braking force along the direction of suspension movement.
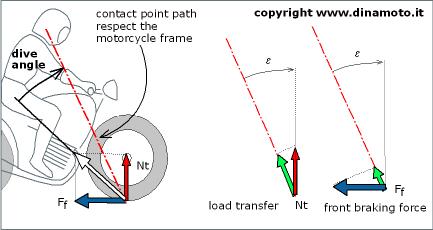
Fig. 2 Force components compressing the front suspension.
To obtain an anti-dive behaviour of the suspension it is necessary to reduce the value of the sum of the two green components; in other words, the direction of the suspension movement should be orthogonal to the resultant force.
If the path were ortoghonal to the road plane, only the transfer load would act on the suspension, therefore the suspension would be partially anti-dive. On the other and if the path were ortoghonal to the resultant force the suspension would not be compressed, hence the suspension itself would be completely anti-dive.
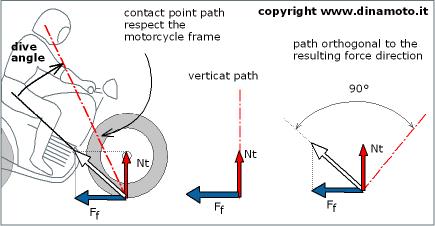
Fig. 3 Dive angle
The angle between the resultant force and the path is an index of the kinematic anti-dive behaviour. When the index is 0°, the suspension has the maximum diving behaviour, with an angle value equal to 90° , the suspension is completely anti-dive.
Telescopic forks
Let us consider a motorcycle with a classical telescopic fork suspension.
Only the front brake is used to stop the motorcycle. The ratio between the force compressing the springs and the front braking force is:

This ratio depends mainly on the castor angle.
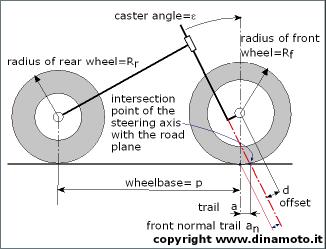
Fig. 4 Motorcycle geometry with front fork.
The next figure shows the force ratio for a motorcycle with the following geometric data: wheels radius Rr=297 mm; wheelbase p=1475 mm; rRatio mass centre height/ wheelbase h/p=0.5, offset d=30 mm.
The maximum dive behaviour is obtained with a castor angle equal to about 63°; the decrease of the castor angle slightly improves the anti-dive behaviour of the telescopic forks (the normal castor angle ranges from 22° to 35°).
Fig. 5. Non dimensional compressing force versus castor angle.

Fig. 6 Geometry animation.
BMW Telelever
This original front wheel suspension is based on a spatial mechanism RSPS that has two degrees of freedom.
The link S-S can rotate around the revolute axis, which is defined by the centres of the spherical pairs; this movement represents the extra passive degree of freedom, that involves only one link of the mechanism in the movement and makes steering possible. The degree of freedom of the whole mechanism is used for the suspension movement. From this point of view the spatial mechanism can be considered a plane mechanism; this mechanism (four bar linkage RRPR) has four links connected by three revolute pairs and a prismatic pair.
The Telelever's fork tubes do not contain any springs or dampers; in this way the inertia around the steering axis is lower if compared with that of the traditional telescopic fork.
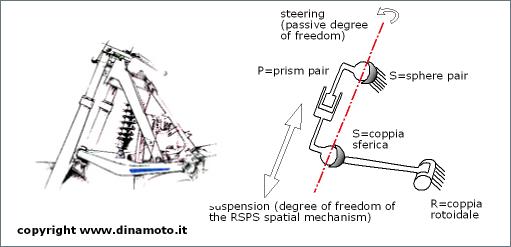
Fig.7 Telelever mechanism.

Fig.8 Motorcycle with Telelever mechanism.

Fig. 9 Geometry animation.
Comparison between BMW Telelever suspension and classical telescopic forks
What kinematic characteristics would have the ideal front suspension?
For example, during the braking:
- will the trail and the steering angle increase, decrease or maintain constant values ?
- will the wheelbase vary or remain constant ?
The question probably doesn't have a unique answer, however it is necessary to distinguish between two different situations:
- braking in rectilinear motion;
- braking while entering a curve.
In the first case it is important that the trial remain constant (or increase slightly ) in order to improve the directional stability.
Moreover, the limitation of the compression of the front fork is important for maintaining the trim of the motorcycle (to limit the forward pitch rotation). Finally, the wheelbase would not decrease in order to limit the transfer load.
In the second case, while entering a curve, a small decrease of the trail is favourable because the high load on the front wheel requires more steering effort to set the motorcycle in the corner.
In the following figures the variations of the castor angle, the trail, the wheelbase, for two motorcycle with different front suspension are shown. The data used for the Telelever, which refers to BMW R1100R, probably are not quite exact, but the general behaviour would not change dramatically.
Fig. 10. Castor angle versus fork movement.
Fig. 11. Trail versus fork movement.
Fig. 12. Normal trail angle versus fork movement.

Fig. 13. Wheelbase versus fork movement.
Therefore, from a kinematic point of view, the main differences are the following (wheel travel equal to 130 mm).
trail [mm]
wheelbase [mm]
castor angle
dive angle
A more thorough answer to our question may be obtained only by means of a dynamic analysis of two motorcycles equipped with the Telelever and the traditional forks, and having the same stiffness and damping for a given wheel rate.
