|
di Alessandro Terranova Responsabile FMEA - GETRAG di Bari traduzione di Luigi Mitolo |
|
di Alessandro Terranova Responsabile FMEA - GETRAG di Bari traduzione di Luigi Mitolo |
The mechanical transmission has always been considered the pinnacle of mechanics. For this reason, we want to dedicate this paper to this fascinating mechanism. A system of gears and shafts, working together to make riders feel wonderful sensations, turns this mechanism into a "magical" device which can enhance or diminish the performance of an engine. The biggest motorcycle and car manufacturers invest considerable resources to study this device, because they are aware of its importance for the technical and marketing success of a vehicle. How many of us, however, really know how it works and what its purpose is?
Let's start by explaining why a transmission is necessary. More technical details will follow in the next reports. Clearly, the task of a transmission is to modify the engine's acceleration instant by instant, to match variations in load (rider, fuel, luggage, road gradient and aerodynamic resistance) and in the required speed.

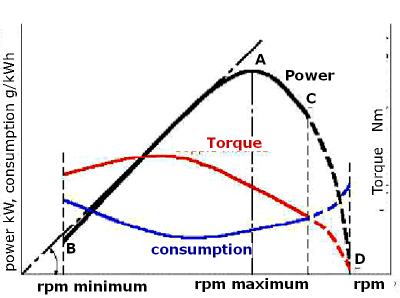
Torque and power curves
Broadly speaking, we can say that transmissions are used to adjust the crankshaft revolving speed to the driving wheel's; a transmission is, in practice, a torque converter. In other words, a device which must supply higher "thrust force", whenever the sheer engine power would not be sufficient.
The presence of this device is therefore linked with the engine torque curve trend, and in particular, the absolute torque value supplied at different engine RPM values.
What is a torque curve?
 |
 |
By torque we mean the twisting moment which the shaft can supply.
Every time that the piston receives a thrust caused by expansion of the air and fuel mixture, it applies a force to the connecting rod, which, multiplied by the "crank arm" (indicated as A), will generate torque on the shaft.
The torque curve, just like the power and consumption curves, can be plotted experimentally by bench testing.
In particular, the torque curve can be obtained experimentally, by braking an engine with electric or hydraulic braking devices. The resulting curve is then plotted on a system of Cartesian axes, in which the number of crankshaft revolutions per minute(engine speed or RPM) is indicated on the X axis, and the twisting moment, expressed as Nm , is indicated on the Y axis.
As you can see in the graph, the first part of the curve climbs rapidly to match the RPM increase, until it reaches its highest point.
This point indicates the maximum torque value on the Y axis: at this point, the engine makes the most of the volume of fluid entering its combustion chamber, and the highest efficiency is obtained.
After the maximum torque point, the curve downward trend begins, because the engine characteristic efficiency decreases.
The actual driving torque (i.e. the torque which can be measured at the wheel) is invariably smaller than the torque that we have just described (i.e. the torque virtually detected at the crankshaft).
These two quantities are linked by the following expression:
Cm(actual) = Cm(crankshaft) × h m
where h m is the engine's mechanical efficiency, a numerical coefficient smaller than one, which takes into account mechanical loss and varies to match any RPM variation. In fact, the volumetric efficiency h v, and thermal efficiency h t, should also be taken into account: consequently, the actual maximum torque is reached when the maximum product of volumetric efficiency h v, thermal efficiency h t and mechanical efficiency h v is obtained. Another consideration is power. We all know that, in order to increase our vehicle's power, we must "open the throttle", in other words, supply more energy to our engine (in the form of air/fuel mixture). This is clearly shown by the following relation:
P(crankshaft) = C(crankshaft) × w × 10-3 (KW)
When w (rotation speed) increases, power also increases, torque being the same, while if we assume that the displacement and w remain constant, power will increase as torque increases. Clearly, the power curve and torque curve are closely related. As we can see in the graph, the power curve has an upward trend characterised by a steep slope; this trend is due to the fact that, in its initial part, the torque curve also climbs rapidly. After the maximum torque value, power continues to increase, however, because the increase in RPM prevails over the decrease in torque value.
As the engine RPM value continues to increase, a value (point A) is reached, beyond which the active fluid volume, present at each revolution, can no longer grow as fast as the number of cycles in the time unit. This is caused by the fact that the combustion chamber filling coefficient value tends to decrease. This is added to a reduction in the engine global efficiency, inversely proportional to the number of cycles (see the torque curve), which determines a downward trend for the power curve.
In actual practice, the power curve never turns into a broken line, because the engine resistance might fail during the test. Engines are normally designed and sized to only withstand extremely high RMP for just a few seconds (see point D on the graph).
Point B indicates the minimum working speed. When the engine is idling, mechanical resistance will absorb all the power developed by the active fluid: below this speed, the engine's performance will be affected, because of both unsuitable fuel supply (caused by the fluid speed and fluid port size), and unsuitable driving torque. Mechanical transmissions enable to find the best operating conditions for any combination of speed, load and RPM
The gearbox
The purpose of the gearbox is to modify the drive ratio between the engine and the wheels, so that the speed of each engine revolution corresponds to a different wheel turning speed.
This is the origin of the drive ratio concept.
Each pair of "in-mesh" toothed gears is characterised by a parameter called drive ratio. This number is univocally determined by the diameters (radiuses) of the two gears, in other words, by their number of teeth.
The gear receiving the drive from "upstream" is called the driving gear which transmits the drive to the other gear called the driven gear.
The driving gear acts as a "step-down" gear if it turns faster than the other gear; in the opposite instance, it acts as a "step-up" gear; generally, reducing is always necessary because the engines turn faster than the users.
The drive ratio is theoretically defined by the quotient:
![]()
In practice the manufacturers use the opposite of this ratio, not using rotating speeds to define but rather the number of teeth in the case of toothed gears or diameter in the case of pullets, quantities anyways linked by precise relations.
Indicating the number of teeth and the diameter of the driving gear with Z1 e D1 respectively and with Z2 and D2 the same quantities for the driven gear, we obtain the following "operating" definition of drive ratio:
![]()
In the future we also will use this definition.
The gearboxes used in the engines and in step-down gears generally have driving gears smaller then driven gears. This is the reason why manufacturers indicate values higher than one to refer to their adopted speeds.
In a gearbox, the velocity tends to diminish as the gears go up, sometimes to the exclusion of the highest gears. Considering a value for transmitted power of:
C1 × w1 = C2 × w2
in the case in which power remains constant, necessarily the torque will rise. For this reason, mechanical gears can be seen as "torque amplifiers".
Let's consider for example a gear with 10 teeth transmitting the drive to a gear with 20 teeth: in the shift from the former to the latter, speed will be reduced by half and the transmitted torque will double.
Having terms the following meaning:
dove i termini che figurano hanno il seguente significato
C1 = driving gear torque
C2 = driven gear torque
w1 = driving gear angular velocity.
w2 = velocità angolare ruota condotta
v1 =velocità lineare ruota motrice
v2 = driven gear angular velocity
R1 = driving gear radius;
R2 = driven gear radius
We obtain the relation:
![]()
When the first ratio (first gear) is selected in the gearbox, the engine will turn at high RPM , while the rotation speed of the rear wheel will be low; the torque acting on this wheel (C2) will be very high. Hence the possibility, when "low gears" are selected, to ride over steep slopes and control sudden acceleration: the maximum driving torque is available at the wheel.
We can therefore say that, when the engine runs at a given RPM, the work carried out by the rear wheel within the time unit (Power) is always the same, notwithstanding the selected ratio.
If, however, in "low gears" the rear wheel turns slowly but transmits high torque values, the opposite occurs in "high gears": the rear wheel turns quickly, transmitting lower torque.
During travelling, it will therefore be possible, for each vehicle travelling speed and for each load condition (gradient, required acceleration etc.), to obtain a certain engine RPM value, corresponding to suitable power delivery, by selecting the right gear.
The best results in terms of acceleration are obtained by choosing a ratio enabling the engine to turn as close as possible to the highest torque value. With motorcycles, the drive is actually transmitted from the engine to the wheel in two separate phases: the final drive, which consists of the front and rear sprocket and chain, and the primary drive, which consists of a small primary gear keyed to the end of the crankshaft a large primary gear normally keyed to the clutch and located on the gearbox primary shaft.
Two additional drive ratios (primary=pignone and final=corona) are therefore defined, with the gearbox in between.
Example:
![]()
adding 3 tooths to the driven gear
![]()
diminishing 1 thoot to the driving gear
![]()
the ratio is the same.
Gearbox position
In motorcycle field the gearbox is usually in a unique block with the engines, except in some case in which the gearbox is separate from the engine. An example is the MOTO GUZZI in which the gearbox is separate from the engine.
MOTO GUZZI, in fact, uses a philosophy deserted now. This philosophy was used by English motorcycles factory because it was economic and simply.
The gearbox, in this case, could be used for very different engines.
Today the gearbox in an unique block with the engine, represents one of the most practical and modern solution. It allows to simplify the lubrication system.
The problem due to the fact that is impossible to use the gearbox as an interchangeable component, is exceeded choosing the distance between the shafts of the gear. This distance will be the same for several typology of engines. In this way it is possible optimise serial production.

Next figures show examples of one, two and four cylinders engines with integrated gearbox.
 |
 |
 |
Typology of gear
Today the most important typology of gear are:
· TRANSMISSION WITH MESHING GEAR
· TRANSMISSION WITH CLUSTER GEARS
There are uncommon cases in which the gear acts by main transmission, because it has the driving gears on the crankshaft. There are also cases in which the lay shaft of the gear transfer the motion directly to the wheel (Piaggio Vespa). Finally there are automatic gear that can be composed by a variable pulley or by a centrifugal variator of speed.
Next figures show some example of the three typology.
 |
 |
|
|
|
 |
 |
|
Transmission with centrifugal variator
|
|
Transmission with meshing gear
This kind of gear is characterized by the coaxiality between the chain sprocket of the final transmission and the main shaft.
The chain sprocket, infect, is mounted upon a big hollow shaft coaxial to the primary shaft, but independent from the last one in the rotation.
This gear always has two couple of gears in continuous contact between them. Only when is engaged the hold direct, fails the continuous engage of two gears, because the primary shaft is directly linked to the hollow shaft, and the chain sprocket of the final transmission rotate to the same speed of the gear of the main transmission.
The following figure shows a typical scheme of this transmission, with particular emphasis on the gears mounted fixed, fixed but flowing along the shaft and free gears mounted on bearings.
Later on the cinematic scheme for every ratio.
 |
1) ending shaft, free on the primary shaft with the transmission with meshing gear and the chain sprocket 2) driving gear of the 5th speed gear flowing along the shaft 3) driving gear of the 3rd speed free on the shaft 4) driving gear of the 2nd speed fixed on the shaft 5) driving gear of the 1st speed fixed on the shaft 6) main shaft 7) lay shaft 8) fixed gear of exit of the lay shaft 9) driven gear of the 5th speed free on the shaft 10) driven gear of the 3rd speed flowing on the shaft 11) driven gear of the 2nd speed free on the shaft 12) sleeve with frontal tooth flowing on the shaft 13) driven gear of the 1st speed free on the shaft 14) frontal clutch tooth |
 |
 |
 |
 |
 |
 |
Transmission with cluster gears
Today is the most diffused in motorcycle field. This gear is composed by a main shaft, that receives the motion by the driving transmission and has as task to transfer the motion through the driving gears and by a lay shaft on which are mounted driven gears and the chain sprocket of the ending transmission. In this case works also one couple of gears at a time.
 |
1) main shaft that receives the motion by the main transmission 2) fixed driving gear of the 1st speed gear 3) free driving gear of the 5th speed gear 4) floating driving gear of the 3rd speed gear 5) free driving gear of the 4th speed gear 6) fixed driving gear of the 2nd speed gear 7) lay shaft that transmit the motion to the ending transmission 8) free driven gear of the 1st speed gear 9) floating driven gear of the 5th speed gear 10) free driven gear of the 3rd speed gear 11) floating driven gear of the 4th speed gear 12) free driven gear of the 2nd speed gear 13) chain sprocket of the ending transmission Centrifugal variator of speed |
 |
 |
 |
 |
 |
 |
Centrifugal variator of speed
The centrifugal variator of speed maybe is one of the most diffused transmission systems on low-powered motor vehicles thanks to the advantages that offers in terms of sprint and economy.
This system is like a progressive gear with infinite ratios included between a minimum and maximum ratio.
The variation of the ratios is not divided in steps but is continuous.
It is like to have two gears linked with the diameter that change continuously in function of the transmission ratio needed to win the external resistances that the vehicle meets during the motion (slopes, weight change, roughness, etc.).
Next figure shows a variator of speed.

Gear ratio tuning
The gear ratios must be tuned so that adapt the vehicle to the road. Through the tuning of the final ratio it is possible to vary the maximum speed of the motorcycle: more?long? is the ratio, more high is the maximum speed, but higher is the time to reach it.
Let suppose to be on a motor racing circuit. The tuning of the gear starts by the first speed gear on the lower part of the circuit.
The following speed ratios are divided between the first and the last ratio. The last one is tuned considering the faster part of the circuit and the maximum engine rate: if the engine rate doesn?t the maximum, the ratio is too ?long?.
On the contrary if the maximum engine rate is obtained too quickly, the ratio is too ?short?.
In conclusion the first speed gear is tuned to obtain the maximum engine rate in the lower part of the circuit. The others ratios are set between the first and the last speed gear.
< 
Subdivision of the gears
The subdivision of the gears consists on tune the ratio of the gear between the first and the last gear.
A good subdivision consists on tune the ratios so that the engine rate do not falls too much between two gears.
Command devices
The most diffused command device to change the ratio between the engine rate and the wheel rate is the desmodromic selector.

It is formed by a cylindrical selector, gearbox drum, that has on the surface special grooves. These grooves are guides for the gear selector forks that move the gears on the shafts. This cylindrical selector is rotated in jerks by a mechanism linked to the gear change pedal.
Every time the gear change pedal is worked, the cylindrical component rotates and the gear selector forks move the gears.
Sometimes the cylindrical selector is replaced by al plate with particular grooves in which are inserted the tooth on the forks. The extremity of every fork is characterized by a arc of circle profile. This profile is set in a circular groove on a fluent gear.
This gear, free to move on the shaft thank to the grooved profile, is locked up during the rotation of the shaft. This gear has some teeth that engage the gears fixed on the shaft.
Thank to the motion given by the gear selector forks, the fluent gear links itself to the fixed gear and so it transmits the torque received by the gear with which is linked.
In this way it is possible transmit the motion between a free gear and a fixed gear. The first one is characterized by the possibility of rotate around its own axis thank to a bearing; the second one is tied up to rotate with the shaft thank to the grooved profile.
Resuming, the gear change pedal works the selector that generates the rotation of the gearbox drum. The rotation of this part moves the forks that makes free or linked to the shaft the desired gear.
 |
 |
